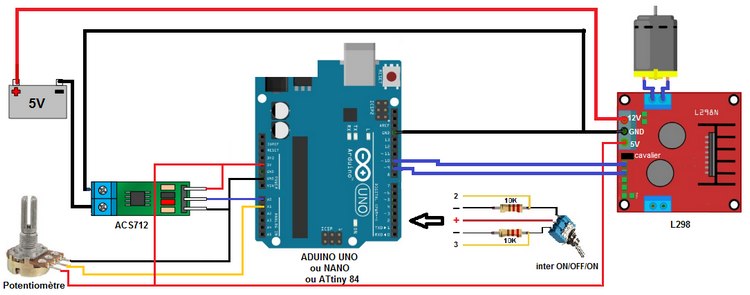
Fonctionnement avec un interrupteur ou deux voies TOR
Il ne faut pas mettre le cavalier
Inter au centre le moteur est ŕ l’arręt.
Inter dans un sens le moteur tourne dans un sens, jusqu'ŕ ce qu'il arrive en butée.
Inter dans l'autre le moteur tournera dans l'autre sens jusqu'ŕ ce qu'il arrive en butée.
Si le moteur n'est pas arrivé en butée nous pouvons manipuler l'inter dans les deux sens. Il est donc possible d’arręter ou d'inverser le sens de rotation du moteur n'importe quand.
_________________________________________________________________________________
Fonctionnement avec une voie proportionnelle
Il faut mettre le cavalier entre la pin 5 et le GND.
Avec une voie proportionnelle le comportement du montage est identique ŕ celui observé avec une commande par interrupteur
|